
Obtenga más información sobre los robots rectificadores de piezas de trabajo en los casos de automatización de desbarbado de fundición
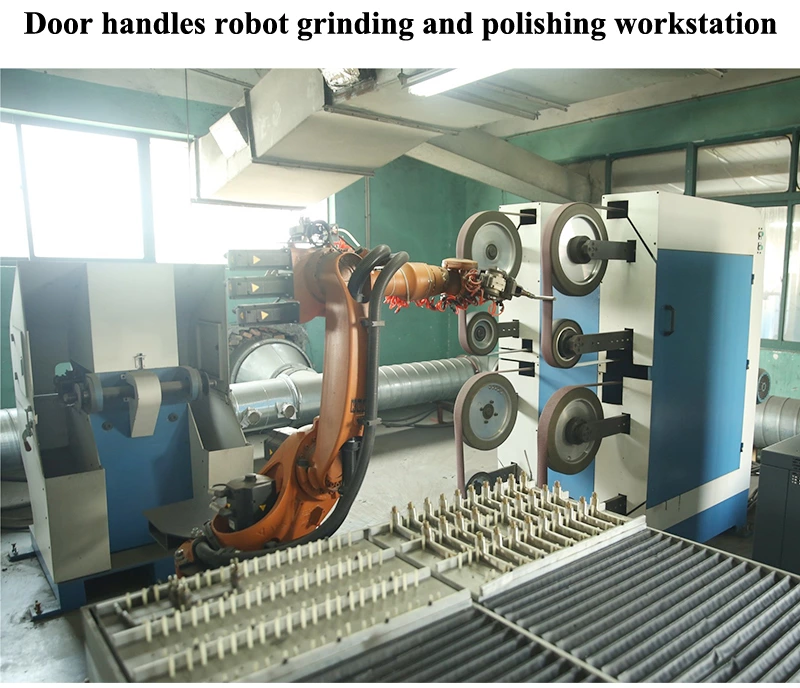
Estación de trabajo robótica de rectificado y pulido para rectificado y desbarbado de culatas de cilindros de fundición

La estación de trabajo de rectificado y desbarbado de culatas de cilindros de automóviles fundidos utiliza un robot rectificador de piezas de trabajo. Utilizando una combinación de máquina multieje + máquina de cinta + husillo flotante.
Puede eliminar rebabas como agujeros, bordes, líneas y superficies de piezas causadas por golpes de presión y fuerza de sujeción insuficiente para mejorar la eficiencia de la producción, reducir costos y mejorar el rendimiento del producto;
El desbarbado flotante se utiliza para tratar rebabas de formas irregulares, como bordes, esquinas y agujeros transversales, que son difíciles de mecanizar.
Deje que el mecanismo flotante y la herramienta sigan el procesamiento de las rebabas de la pieza de trabajo y elimine las rebabas de manera flexible como una mano humana deslizándose sobre las rebabas de la pieza de trabajo, evitando efectivamente otros factores como la rigidez del brazo robótico, errores de posicionamiento, errores de la pieza de trabajo, etc.
Cuando se trata de rebabas irregulares, es fácil romper el cuchillo o dañar la pieza de trabajo debido a una fuerza desigual.
Conozca el robot pulidor
El esmerilado y pulido tradicional de herrajes/piezas fundidas lleva mucho tiempo, tiene problemas de calidad del producto y las chispas, el polvo y el ruido generados en el entorno de trabajo afectan gravemente la salud física y mental de las personas.
Si observamos el desarrollo de la industrialización global, con la desaparición del dividendo demográfico, la reducción de los costos de los productos y los requisitos para mejorar la calidad de los productos, las perspectivas del mercado para los robots pulidores son amplias.
Características del pulido y pulido por robot.
1. La estación de trabajo robótica cerrada aísla el ruido y el polvo del exterior y reduce la contaminación ambiental;
2. Los operadores no tienen contacto directo con equipos de procesamiento peligrosos para evitar lesiones relacionadas con el trabajo;
3. El robot puede mantener la consistencia en la precisión del procesamiento del producto, lo que no solo garantiza una calidad confiable sino que también reduce la tasa de desechos;
4. Los robots reemplazan a los trabajadores calificados, lo que no solo reduce los costos laborales, sino que tampoco afecta el tiempo de entrega debido a la pérdida de operadores;
5. El robot puede trabajar continuamente las 24 horas del día, lo que mejora enormemente la eficiencia de la producción;
6. Redesarrollo, los usuarios pueden realizar programación secundaria basada en diferentes muestras, acortando el ciclo de modificación y reemplazo del producto y reduciendo la inversión correspondiente en equipos.
¿Qué es un robot rectificador de piezas de trabajo?
Robot rectificador de piezas de trabajo: es un tipo de equipo de máquina herramienta rectificadora que sujeta piezas de trabajo a través de pinzas robóticas y entrega las piezas de trabajo en varias posiciones fijas.
Un sistema de procesamiento automatizado con robot rectificador que completa diferentes procesos, como rectificado y pulido, y varios procesos de pulido. Entre ellos, el robot abrasivo con cinta lijadora es el más típico.
Constituir:
1. Cuerpo del robot.
2. El equipo de rectificado equipado con un robot rectificador de piezas de trabajo.
3. De acuerdo con los requisitos del proceso de rectificado, configure una lijadora de banda, una amoladora, una máquina pulidora, etc., respectivamente.
4. De acuerdo con los requisitos de precisión, se configuran respectivamente los equipos de esmerilado y pulido para mecanizado en desbaste, semiacabado, acabado y otros procesos.
5. Accesorio para robot rectificador de piezas de trabajo.
6. Tecnología de control de fuerza para robots rectificadores de piezas de trabajo.
El robot pulidor de piezas de trabajo puede equiparse con un controlador de fuerza según las necesidades de pulido y puede proporcionar información oportuna sobre la adhesión del robot a través del sensor de fuerza.
Es decir, la adherencia entre la pieza de trabajo y el equipo de rectificado durante el proceso de rectificado, así como el grado de rectificado, evitan que el robot se sobrecargue o que la pieza de trabajo se pula adecuadamente.
Esto garantiza la consistencia del rectificado de la pieza y evita productos de desecho.

