
Estación de trabajo robótica flexible para pulido y rectificado
Estación de trabajo robótica flexible para pulido y rectificado (el robot agarra la pieza de trabajo)
En comparación con el pulido manual tradicional, que tiene la desventaja de desviarse y difuminarse fácilmente, la estación de trabajo de pulido robótico KS utiliza tecnologías avanzadas como retroalimentación de control de fuerza en tiempo real, ajuste de trayectoria de precisión y ajuste de fuerza de contacto de precisión para lograr un pulido seguro, estable y operaciones eficientes de pulido y esmerilado.
Supera las deficiencias de los robots tradicionales, como la facilidad de ataque por error, el largo tiempo de depuración y la calidad inconsistente de los productos terminados, por lo que tiene ventajas diferenciadas obvias.
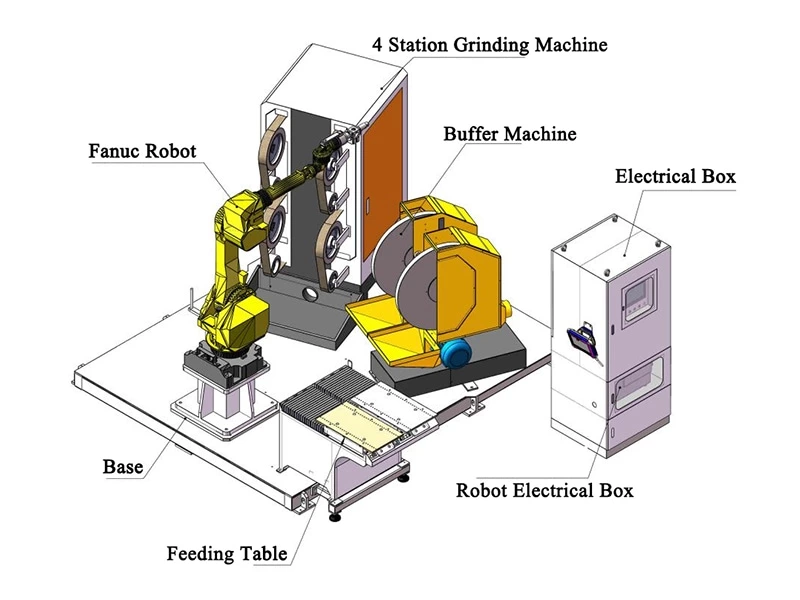
Composición de la estación de trabajo del robot de rectificado flexible
1. Pulir el cuerpo del robot.
2. Red neuronal de percepción flexible del robot (táctil + visión)
3. Pinza final del robot
4. Fórmula del proceso (diseño de la forma de la herramienta de rectificado + número de malla + número de rectificado + actuador de potencia + velocidad + par + trayectoria + percepción flexible)
5. Máquina de cinta flexible controlada por fuerza
6. Mesa giratoria de doble estación (incluido el sistema de sujeción)
7. Biblioteca de herramientas de rectificado flexible
8. Software de programación sin conexión
9.Sistema de molienda flexible STA (Stial Rapid)
10. Sistema de seguimiento visual (OWL)
11. Sistema inteligente de posventa (MovS)
12. Sistema de control central, sistema de eliminación de polvo, sistema de protección de seguridad.

